船用仪表用步进电机细分驱动的实现(二)
(本资料由优利德、万用、三和 欣宝一级代理—深圳海旭仪器仪表提供)
步进电机组合电阻式细分驱动的软件设计
1、指示参数位置与步进电机微步数的关系
在本设计中,要显示的参数有温度、压力、转速和电压。温度显示范围为40℃’120℃,压力显示范围为O“1MPa,转速显示范围为0~3 000 r/min,电压显示范围为18 V~32 V。在此对温度显示与步进电机微步数的计算关系进行说明,其余三表类似。根据厂家给定的温度面板满量程刻度为112.5。步进电机细分驱动中每一步旋转角度(1/12),因此当达到满量程时步进电机的微步数为step=112.5×12=1 350步。但温度是从40℃开始显示的,应将40℃作为指示零点,且满量程为120℃,满量程点与初始点相差温度为80℃,而它们之间的物理角度差为112.5。,因此温度每相差一度,指针应走过的物理角度为(112. 5/80),温度与电压近似成线性关系
根据式(2)和式(3)就可计算出相对应的目标温度值y,再根据式(4)就可计算出目标温度相对应的仪表指针位置,即指针距初始点(“?0℃”点)的微步数。将此位置与指针的当前位置进行比较,即可得到指针应转动的方向和转角。由此可建立温度一微步数表,通过查表的方式就可得到目标温度值所对应的微步数。由于温度与电压之间的非线性关系及电机齿轮的误差影响,导致满度定位有偏差,可以通过分段线性处理的方法,在半满量程点、2/3满量程点和满量程点,对式(4)进行补偿修正,从而获得准确的定位。
2、仪表指针跟踪算法的实现
仪表指针运行的效果要求平滑且跟踪快,要满足这两项要求,必须要有好的升降频控制算法,因此必须在软件设计上配合实现硬件电路的细分驱动。硬件电路提供驱动步进电机的阶梯波形,软件设计将控制此波形的时间间隔,使得指针快速、精准地定位,并且平滑、无卡滞地运行。主要包括指针归零模块、分频驱动中断模块、跟踪控制模块。
常用的升降频控制方法有3种
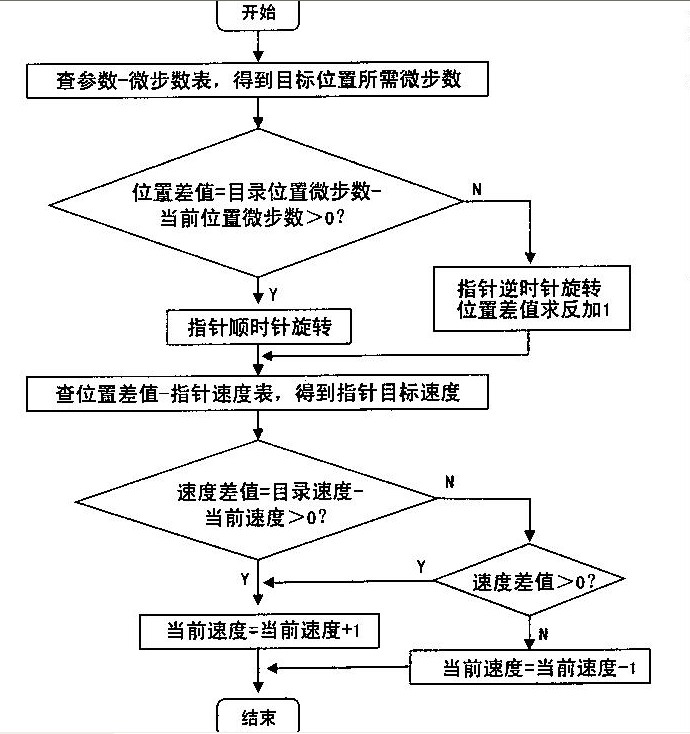
直线升降频、指数曲线升降频、抛物线升降频。直线升降频是以恒定的加速度进行升降,平稳性较好,适用于速度变化较大的快速定位方式。软件实现比较简单,但其加速度时间比较长,指数升降频控制具有较强的跟踪能力,但当速度变化较大的时候其平衡性较差。抛物线升降频是将直线升降频和指数曲线升降频相融合,充分考虑到步进电机低速时的有效转矩,使升降速的时间大为缩短,同时又考虑使其具有较强的跟踪能力,这是一种比较好的升降频控制方法,本设计所采用的升降频控制方法正是此方法。指针跟踪程序流程图如下图所示,查参数一微步数表得到目标微步数后,与当前位置比较确定指针的转动方向和转角。为使指针能快速跟踪、准确定位,需要按抛物线升降频法,建立一张位置差值一指针速度表,当目标位置离当前位置较远时,指针速度较快,反之则较慢,如参数突然变化较大,不能直接从上一较快(较慢)的指针速度一次变化到较慢(较快)的目标速度,会使指针产生卡滞、抖动等现象,此时应在程序中控制指针速度渐进的变化。
将步进电机应用到船用仪表中,推动了数字化指针仪表的发展,显示方式更符合人机工程学的要求。本文对实现组合电阻式步进电机细分驱动的软硬件设计进行了描述,与专用芯片法(硬件)和PWM脉宽调制法(软件)相比,性价比较好。仪表指针跟踪位置的准确性、快速性及运行平稳性都超过了普通模拟指针表的功能,有着较强的通用性和广阔的应用前景。该仪表已通过厂家的装船测试,各项指标达到设计要求,并已交付使用,运行正常。
公司名称:深圳海旭仪器仪表有限公司
公司网址:http://www.haixuyq.com/